

五天课纲
注重动手实验,轻松掌握深度学习+ROS实例开发方法
第一天 ROS基础及核心知识 |
|
| 技术要点 | 学习目标 |
| ROS简介及安装
n 机器人简介和发展现状 n 安装ROS n 配置开发环境 n 安装开发工具 n 安装教学包 |
了解什么是ROS
掌握ROS的安装和配置 掌握课程程序包的安装和配置 掌握使用Roboware Studio的ROS程序开发方法 |
| ROS基础知识
n Node、Topic & msg n Action & action n Parameter Server n TF、URDF |
掌握ROS通信机制
掌握ROS常见命令 掌握TF 掌握URDF编写方法 |
| ROS工具和开发环境
n Rqt n Rviz n rosbag |
掌握rqt、rviz、rosbag工具 |
第二天 ROSPY |
|
| 技术要点 | 学习目标 |
| Topic
n msg编程方法 n Topic编程方法 |
掌握Topic Python开发方法 |
| Service
n srv编程方法 n Service编程方法 |
掌握Service Python开发方法 |
| Action
n action编程方法 n Action编程方法 |
掌握Action Python开发方法 |
| Parameter server和launch
n Parameter server n Launch文件 |
掌握Parameter设置和获取方法,掌握launch编写方法 |
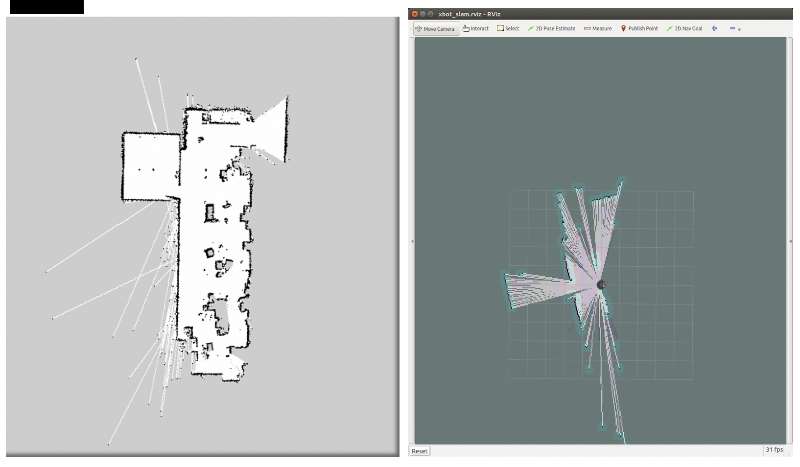
第三天 SLAM建图 |
|
| 技术要点 | 学习目标 |
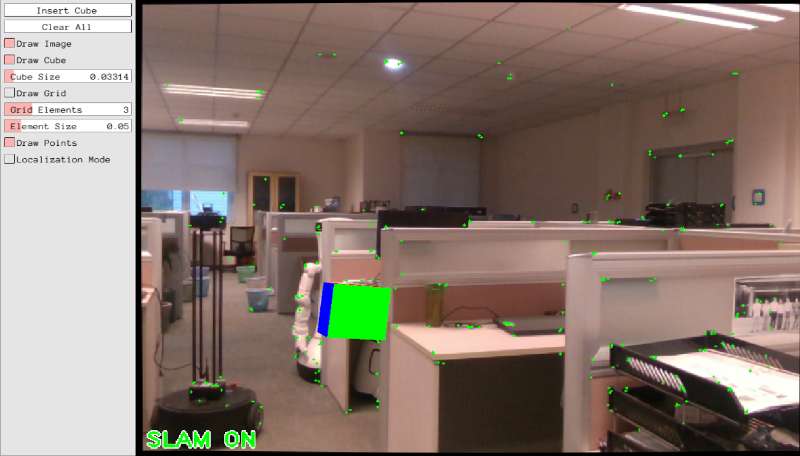
| SLAM简介
n SLAM基础知识 |
掌握SLAM基础知识 |
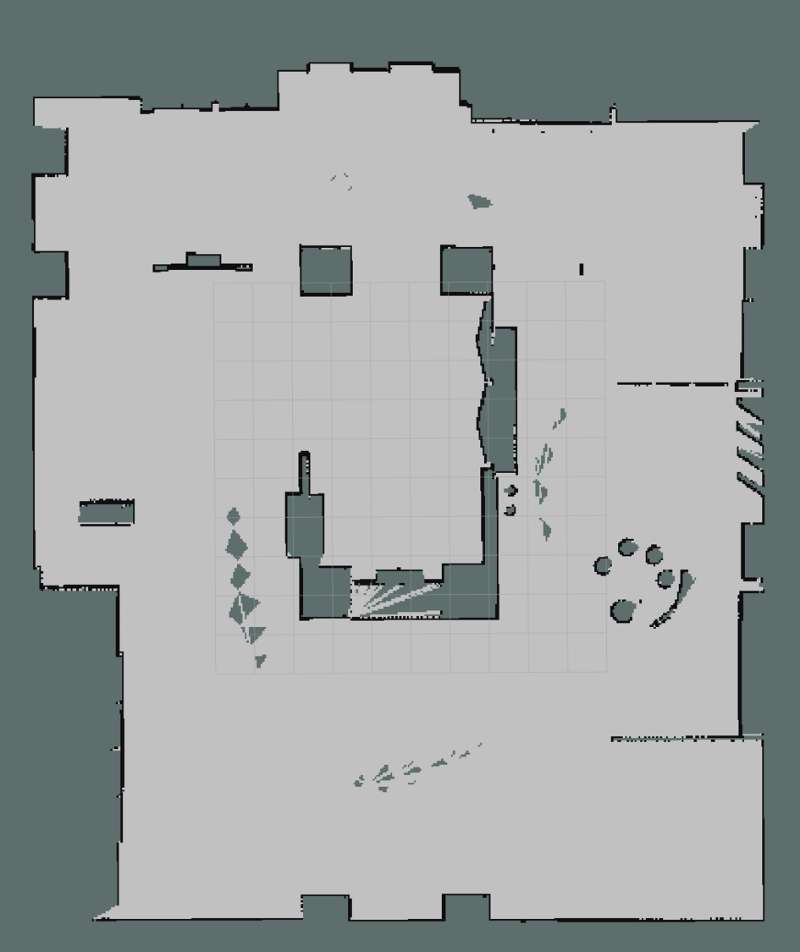
| SLAM练习
n Gmapping功能包介绍与演示 |
掌握Gmapping建图方法 |
| Gmapping详解
n Gmapping算法详解 |
理解Gmapping算法
掌握参数配置 |
| SLAM上机实验或上机实例观摩 | |
| 使用或观摩XBot机器人SLAM建图 | |
第四天 导航开发实例 |
|
| 技术要点 | 学习目标 |
| 导航基础
n global_planner n A* 算法 n Dijkstra 算法 n local_planner原理和实现 n local_planner n dwa_local_planner(DWA) |
理解导航基础知识
理解global_planner原理和实现 理解A* 算法 理解Dijkstra 算法 理解local_planner原理和实现 理解local_planner框架 理解dwa_local_planner |
| 导航实例演示 | 通过演示实例深入了解导航基础知识 |
| 导航开发 | 掌握导航开发方法 |
| 导航上机实验或导航上机实例观摩 | |
| 使用或观摩XBot机器人导航开发实例 | |
第五天 机械臂 |
|
| 技术要点 | 学习目标 |
| 机械臂简介
n 机械臂发展史 n 正逆运动学 n 坐标变换 |
了解正逆运动学和坐标变换基础知识 |
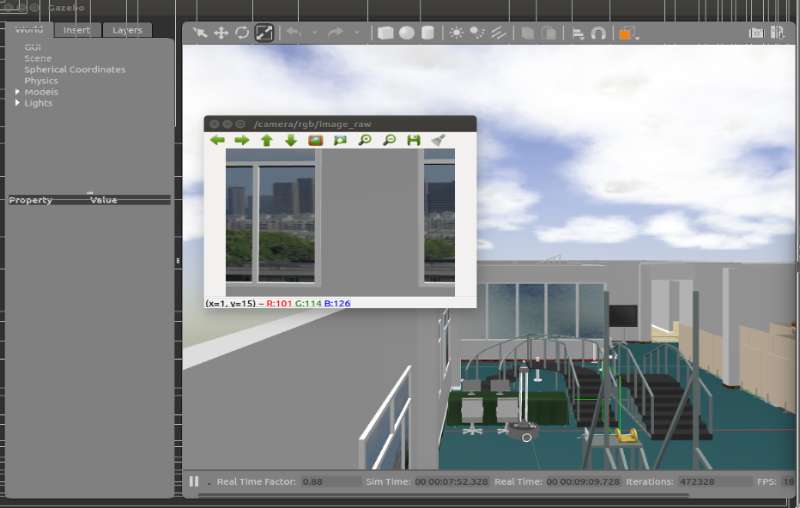
| Moieit!和机械臂Gazebo仿真
n URDF、Xacro n Moveit! n 架构及其可视化配置工具 n ros_control n Gazebo |
掌握URDF
掌握Moveit!架构及其可视化配置工具 掌握ros_control及机械臂Gazebo仿真开发方法 |
| Moveit! Python
n Moveit! Python |
掌握Moveit! Python接口和开发方法 |
| 深度学习概述
人工智能、机器学习、深度学习、神经网络、表示学习、增强学习、迁移学习 |
掌握人工智能、机器学习、深度学习之间的概念关系以及深度学习的分类 |
| Tensorflow
n Tensorflow总体介绍 n 安装部署 n 张量概念 n 基础代码运行示例 |
掌握Tensorflow框架的安装部署以及基本框架思路 |
| 深度学习+ROS实例开发 | |
| 深度学习人脸性别和年龄识别,根据处理结果进行对话和驱动机器人导航到不同目标位置 | 掌握深度学习+ROS实例开发方法 |






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}